
TIL robot er en elektromekanisk maskine der styres af et kredsløb eller et computerprogram. Robotter har udvekslet mennesker ved hjælp af løbende og farlige opgaver, som mennesker vælger ikke at udføre. Til stede robotter klassificeres i forskellige kategorier baseret på deres funktioner og ydeevne som industrielle robotter, kommercielle robotter, servicrobotter, mobile robotter. Her er en servicerobot, der udfører de kontinuerlige opgaver for at byde folk velkommen med en håndbevægelse, der repræsenterer 'Namaste' gennem en optaget stemmemeddelelse. Generelt når vi inviterer folk til hjem, fester, ægteskabsfunktioner, kontor osv., Er vi nødt til at arrangere en person til at hilse og invitere dem ved indgangen. Hvis antallet af mennesker er lavt, er opgaven enklere. Men hvis du hilser på hundreder af mennesker, er opgaven vanskelig. For at overvinde dette problem er her et projekt, nemlig namaste robot med stemmestyring.

Namaste robot
Namaste-robot med stemmestyring
Hovedkonceptet for denne Namaste robotprojekt er at styre de forskellige servomotorer gennem et Arduino-bord. Denne robot scanner de omgivende mennesker og drejer hovedet rundt 180 °. Hvis den genkender nogen i nærheden, ønsker den personen med Namaste med begge hænder, der presser sammen. Det er den traditionelle måde at ønske folk i Indien på. Det anvendelser af robotter involverer i indkøbscentre, parker, kontorer for at tiltrække folk.
Blokdiagram over Namastae-robot med stemmestyring
Følgende figur angiver blokdiagrammet for Namaste-robotten med stemmestyret. I denne type robot er stemmekommandoer programmeret. Hele udviklingskortet kan tilsluttes den fælles strømforsyning. Beskrivelsen af hver eneste blok er som følger. Det Strømforsyning giver strømforsyningen til alle modulerne. Disse moduler kræver strøm i mA, og driftsspændingen vil være 5V.

Blokdiagram over Namastae-robot med stemmestyring
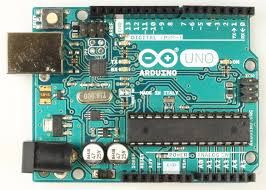
Arduino Board
Arduino er en slags værktøj baseret på et simpelt mikrocontrollerkort, der bruges til at kontrollere og fornemme den fysiske verden end en stationær computer. Til fysisk databehandling er der forskellige mikrocontrollerplatforme tilgængelige. De vigtige funktioner i en Arduino er billig, open source og udvidelig software. Arduino-softwaren er tilgængelig som open source-værktøj, og sproget kan udvides gennem C ++ - biblioteker.

Arduino Board
Ping-sensor
Ping-sensoren bruger SONAR til at kontrollere afstanden til et objekt i dets nærhed. Det her sensoren bruges som robotens øjne for at mærke hindringen. F.eks. nærhedsføler. Det giver en fremragende rækkevidde og stabile aflæsninger. Funktionen af denne sensor påvirkes ikke af sort materiale eller sollys. Specifikationerne for ping-sensoren er spænding er 5V, strømmen er 15mA, sensorvinklen er IKKE> = 15 og detektionsafstanden er 2 cm ~ 450 cm.

Ping-sensor
Grænsefladen mellem ping-sensor og en Arduino er vist nedenfor. Der er fire stifter til rådighed til interface af ping-sensoren med et Arduino-kort. De fire ben på Arduino-kortet er GND, VCC, ECHO og TRIGGER. Stifterne på tavlen er D0-D13, idet 12 og 13 stifter er input- og outputstifter.
Arduino mikrokontroller tilbyder os et servostyringsbibliotek, der lader os nemt skifte servoer. I dette projekt brugte vi 5 servoer til at regulere bevægelserne af Namaste-robotten som hoved, højre albue, venstre albue, højre skulder og venstre skulder. Her betegner de digitale input / output pins (D5, D6, D9, D10, D1) pins i Arduino-kortet, der er grænseflade til servomotorer.
Voice Playback IC
Denne stemmeafspilnings-IC tilbyder den optagede besked, der afspilles med den foruddefinerede frekvenshastighed. Afspilningen flyttes til lydforstærkningsenheden.

Voice Playback IC
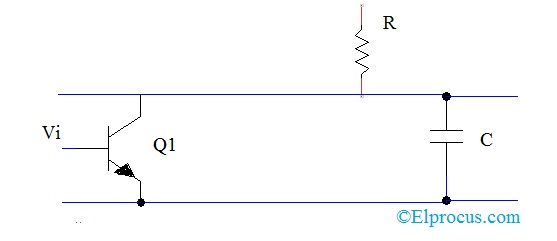
Relæ
TIL relæ er en slags kontakt fungerer elektrisk. Strømmen gennem relæets spole skaber et magnetfelt, som inviterer en håndtag og skifter kontaktskontakterne.

Relæ
Stemmestyring Namastae Robot fungerer
Arbejdet med Namaste-robotten kan udføres trin for trin sammen med de simulerede resultater. Når Namaste-robotten er i en første tilstand, så servomotoren s for robotten 2, 3, 4, 5 er i OFF-tilstand eller nul-tilstand. Hovedet på Namaste-robotten skifter fra center til højre, venstre og derefter tilbage til center på grund af centrifugering af servomotor1 fra 0 ° -180 °. Bevægelsen af robotens hoved specificerer, at Namaste-robotten leder efter en hindring. Når ping-sensoren registrerer en forhindring, vender robotens hovedposition tilbage til midten, og Servomotor1-relikvier i 90 ° vinkel og slukkes. Den aktiveres i lav tilstand.
Når servomotoren1 slukkes, tændes de resterende motorer som servo4 og servo5. Signallinjen udløses for Namaste-robotens højre og venstre skuldre. Nu kan hænderne på en robot bevæge sig op. Skulder servomotorer er grænseflade til Arduino-kortets digitale input- og outputstifter. Men signallinjerne eller disse ben vil være høje, og servostillingen ændres til 90 °. Nu slukkes servo4 og servo 5.
Endelig kan vi konkludere, at hovedformålet med denne stemmestyring robotten skal levere tjenesten af at byde folk høfligt velkommen ved at opdage folk, der går foran det. Den kan bruges på forskellige offentlige steder som parker, indkøbscentre, fester osv. Vi håber, at du har fået en bedre forståelse af dette koncept. Desuden er alle spørgsmål vedrørende dette koncept eller arduino-baseret robotprojekter , bedes du give dine værdifulde forslag ved at kommentere i kommentarfeltet nedenfor.
Fotokreditter:
- Arduino Board nyacknewsandviews
- Ping-sensor parallaks
- Voice Playback IC kealab
- Relæ awdirect
- Namaste robot canstockphoto





{kind=link}
{kind=link}
{kind=link}
{kind=link}