En introduktion til robotter
Robot er maskine, der ligner mennesker. Det er programmeret til at gøre nogle ting. Ordet Robot kommer fra det slaviske ord robota (der betyder tvangsarbejder). Robotten blev udviklet i 1960'erne.Robotter er lavet af metaller og mixer af andre grundstoffer. Robotter udfører bare kommando, og hvad mennesker siger. For tredive år siden var robotter noget i en science fiction-film. Men i dag bruges robotik på mange områder. Og det er meget vigtigt for menneskehedens fremtid. Det robotteknologier forbedres til at hjælpe nationalt forsvar, sundhedspleje, fremstilling, hjemlandssikkerhed, uddannelse, forbrugsvarer og mange forskellige sektorer. Læger bruger allerede robotteknologi i specielle operationer. Robotter er vigtige, fordi det udfører opgaver, der er farlige og umulige for mennesker også at udføre.
5 grunde til, at robotter har været populære
- Hastighed
- Farlige miljøer
- Gentagne opgaver
- Effektivitet
- Nøjagtighed
Hastighed:
Robotter kan bruges, fordi de er hurtigere end folk til at udføre opgaver. Robot er virkelig en mekanisme, der styres af en computer. Vi ved, at computere kan beregne og behandle data meget hurtigt sammenlignet med mennesker. Nogle robotter bevæger sig faktisk hurtigere, udfør en opgave, såsom at samle op og indsætte genstande hurtigere end mennesker.
Farlige miljøer:
Robotter kan bruges i farlige omgivelser, fordi de kan arbejde på et sted, hvor et menneske vil være i fare. For eksempel kan robot designes til at stå med større mængde varme, stråling, kemiske dampe end mennesker kunne.
Gentagne opgaver:
Nogle gange er robotter ikke rigtig meget hurtigere end mennesker, men de er gode til simpelthen at udføre det samme job igen og igen. Dette er let for robotten, for når robotten er programmeret til at udføre et job en gang, kan det samme program køre mange gange for at udføre jobbet mange gange. Og robotten keder sig ikke som et menneske.
Effektivitet:
Effektivitet handler om at udføre opgaver uden spild. Dette betyder
- Spilder ikke tid
- Spild ikke materialer
- Ikke spilder energi
Nøjagtighed:
Nøjagtighed handler om at udføre opgaver meget præcist. I en fabrik, der fremstiller varer, skal hver vare fremstilles identisk. Når emner samles, kan en robot placere dele inden for en brøkdel af en millimeter.
Styring af en robot
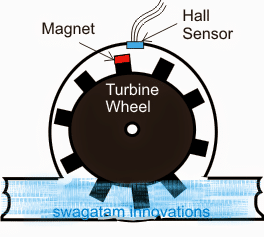
En grundlæggende robot eller et robotsystem består af en stiv krop, der huser hele robotens kredsløb. Kredsløbet består af sensorer, som registrerer ændringer i miljøet og føder denne information til styreenheden.
Baseret på input fra sensorerne styrer styreenheden følgelig aktuatorerne. Således ligger den største betjening af robotten hos styreenheden. I nogle applikationer er robotten fuldstændig automatisk, dvs. kontrollen ligger i selve enheden og baseret på en eller anden sensorenhed styres aktuatorerne automatisk af kontrolenheden. I nogle applikationer styres robotten manuelt.
Lad os se to måder at styre en robot manuelt på
- Brug af en mobiltelefon
- Brug af en tv-fjernbetjening
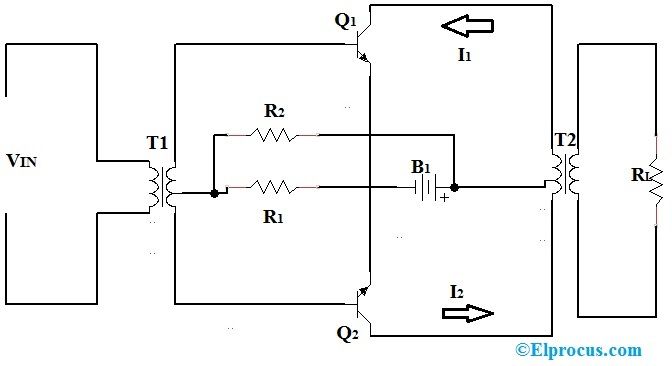
Mobiltelefonstyret robotkøretøj:
Når vi taler om trådløse robotbiler , tænker vi generelt på RF-teknologikredsløb. Men dette projekt er meget anderledes. Den bruger en mobiltelefon til at kontrollere bevægelsen fra robotkøretøjet. Her har vi brugt DTMF-teknologi til at kontrollere robotkøretøjet ved hjælp af mobiltelefonen. Vi brugte to mobiltelefoner, den ene er tilsluttet en robot og den anden er brugertelefonen. Kommunikation etableres mellem disse to mobiltelefoner, og hvis der trykkes på en hvilken som helst tast, høres denne tone i en anden ende af cellen. Denne tone kaldes 'dual tone multi frequency' tone (DTMF).

Mobiltelefonstyret robotkøretøj

Mobiltelefonstyret robotkredsløbsdiagram
Dette projekt er designet til at udvikle en robotkøretøj der styres af mobiltelefonen. Dette er baseret på 8051 mikrokontroller. De to mobiltelefoner styrer robotten efter behov. En mobiltelefon er forbundet til robotten, og en anden er brugercelle. Når en tast, der trykkes på brugerens mobiltelefon, genererer den tilsvarende tone den tilsvarende tone, modtages den i en anden celle. Den modtagne tone behandles af mikrokontrolleren ved hjælp af DTMF-dekoderen. Dekoderen afkoder DTMF-tonen i binære cifre, og disse binært kodede data sendes til mikrocontrolleren. Baseret på input fra mobiltelefonen giver mikrokontrolleren følgelig korrekte signaler til motorføreren om at rotere hver af motoren i den ønskede retning. Når man f.eks. Trykker på et bestemt nummer på brugerens mobil, bliver opkaldet automatisk ringet op til systemets mobiltelefon. Systemmobilen er forbundet til DTMF-dekoderen, som derfor afkoder tonen, og motoren drejes i den retning, der svarer til det trykte nummer.
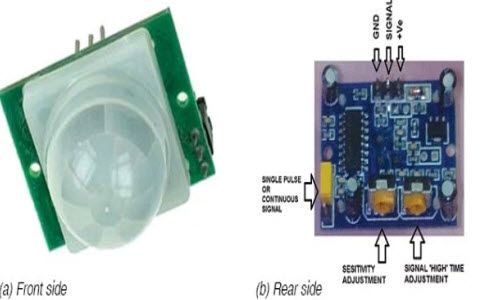
IR-kontrolleret robotkøretøj:
I dette system styres hovedsageligt et robotkøretøj af tv-fjernbetjeningen. Infrarød (IR) sensor er grænseflade til robotstyringsenheden for at registrere fjernsignalet. Denne information videregives til kontrolenheden, som bevæger robotten i henhold til kravet. En mikrocontroller bruges som et kontrolsystem.
I denne IR-fjernbetjening fungerer som en sender. Punktet, når der trykkes på knappen i fjernbetjeningen, passerer signalet og opnås af IR-modtageren. Dette tegn sendes til mikrokontrolleren, der afkoder signalet og udfører den tilhørende bevægelse i henhold til knappen, der trykkes på i fjernbetjeningen. For eksempel, hvis der trykkes på nummer 1 i fjernbetjeningen, drejes robotten til venstre ifølge vores krav. De øvrige tilsagnstest (fremad, bagud og højre) udføres på en sammenlignende måde ved hjælp af IR. I den modtagende ende opnås udviklingen af to motorer, der er grænseflade til mikrokontrolleren.
Programmet er skrevet, dvs. mens det udføres, sender det kommandoer til motordriveren IC i henhold til dets krav til at køre motoren til bevægelse af robotten som forklaret ovenfor.

IR-styret blokdiagram for robotkøretøjer
Hvis du er i tvivl om denne artikel, bedes du efterlade en kommentar. Og lad mig vide mere anvendelse og metoder relateret til dette?