Den elektromekaniske enhed eller maskine, der bruges til forskellige formål og styres og betjenes ved hjælp af programmeringsteknikker kaldes som en robot. Robotterne er forskellige typer baseret på deres applikationer som f.eks industrielle robotter , militære robotter, rumrobotter, indenlandske robotter, gårobotter, klatrerobotter osv. Den mest avancerede robotikprojekter udvikles til effektiv anvendelse inden for forskellige områder til flere applikationer. Lad os i denne artikel diskutere en særlig type robotikprojekter, nemlig linjefølgende robotkøretøj med gang- og klatringsmekanisme.
Robotkøretøj

Robotprojekter for ingeniørstuderende
Det robotkøretøjer er specielle typer maskiner designet til at bevæge sig på jorden, i luften, under vandet og i rummet autonomt uden et menneske om bord. Disse robotkøretøjer styres og betjenes af forskellige sensorer baserede kontrolsystemer. Robotkøretøjerne er specielt designet til brug under forhold, hvor mennesker ikke er i stand til at komme ind, såsom brandulykker, meget høje eller meget lave temperaturer osv.,.
Linjefølgerrobot

Linjefølgerrobot
Robotkøretøjet, der bevæger sig ved at følge en bestemt sti eller linje, kan betegnes som en linjefølgerrobot . Disse linjefølgerrobotter bruges specielt til industrielle applikationer til specielle formål såsom transport af forskellige dele eller maskiner eller køretøjer (biler, cykler osv.) Ved at følge den specifikke linje fra et punkt (genereringsenhed) til et andet punkt (samleenhed) .
Den normale linje, der følger et robotkøretøj med specielle funktioner såsom gang- og klatringsmekanisme, er en af interessante robotprojekter for ingeniørstuderende , som kan bruges til flere applikationer. Nemme trin til at designe en linjefølgerrobot med gang- og klatringsmekanisme er vist nedenfor.
Trin 1: Indsamling af nødvendige komponenter

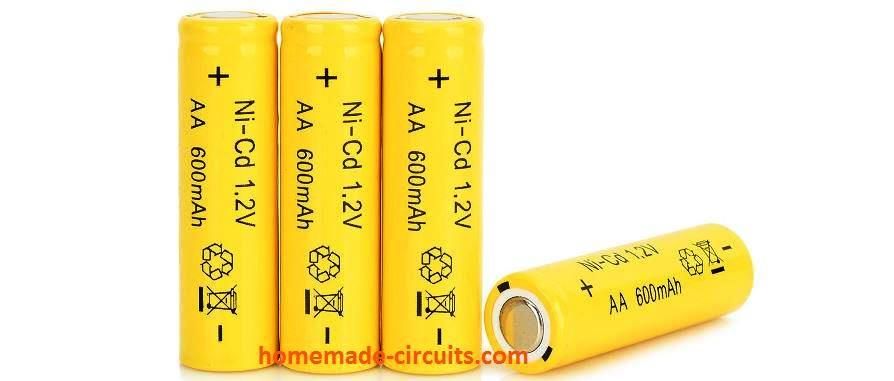
Elektriske og elektroniske komponenter
Komponenterne, der kræves til designlinjen efter et robotkøretøj med gang- og klatringsmekanisme, estimeres ud fra robotapplikation. Saml alle de elektriske og elektroniske komponenter såsom modstande, kondensatorer, IR-sendere, jævnstrømsmotorer, transistorer, robotlegemer og fotodioder med passende klassifikationer sammen med andre dele såsom pap, bolte, møtrikker, aluminiumsstrimler osv., Alt efter behov.
Trin 2: Analyse af kredsløbet til Line Follower Robot

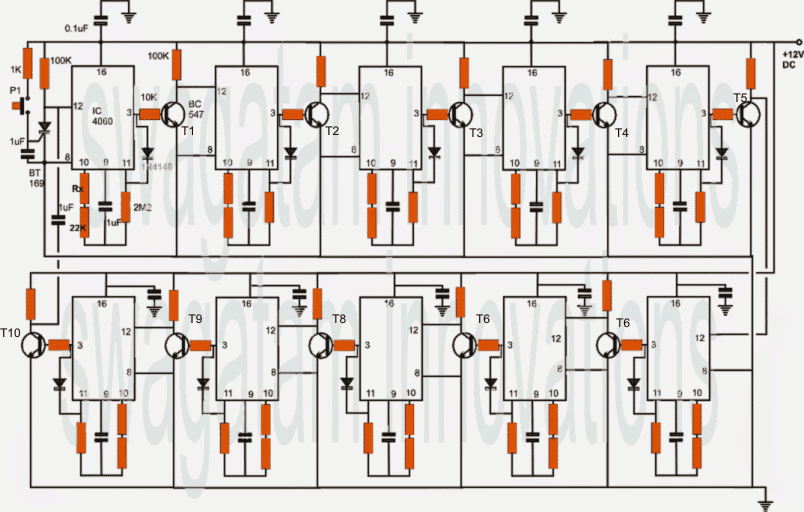
Linje efter robotkøretøj, der kan udvides til at gå og klatre robotblokdiagram
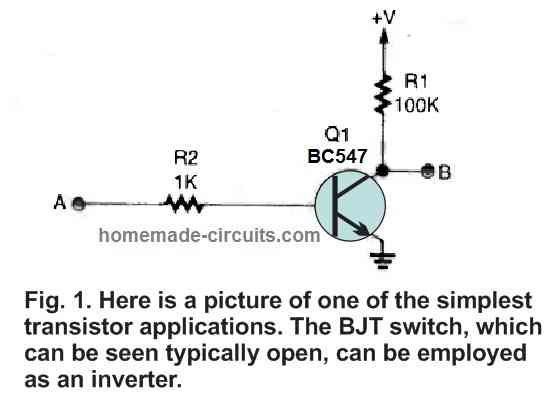
Design primært et blokdiagram over projektkredsløb med forskellige blokke som f.eks strømforsyningsblok , IR LED & fotodiode blok og så videre. Efter at have samlet komponenter, analyser kredsløbsdesignet ud fra at arbejde med forskellige anvendte komponenter. Anbring derefter komponenterne over et loddet brødbræt i henhold til kredsløbsdiagram ved hjælp af tilslutningsledninger til test af kredsløbet, der fungerer, inden kredsløbet monteres på printet. Ved at teste kredsløbet over loddet brødbræt, hvis der kræves ændringer i kredsløbet eller klassificeringen af komponenterne, kan alterneringer let udføres uden at spilde penge og tid til at udskifte komponenter eller ændre kredsløbsdesign.
Trin 3: Montering og lodning af komponenter

Linje efter robotkøretøj, der kan udvides til at gå og klatre-robotprojekt
Efter analyse af kredsløbsdesignet samles komponenterne således i henhold til kredsløbsdiagrammet over printkortet. Lod derefter kredsløbet ved hjælp af loddepistol og loddetråd ved at følge de rette retningslinjer for lodning. Forbind alle dele af robotten korrekt for at danne en linjefølgerrobot som vist på billedet ovenfor, og lim delene af robotkøretøjet, hvis det er nødvendigt.
Trin4: Arbejde med Line Follower Robot
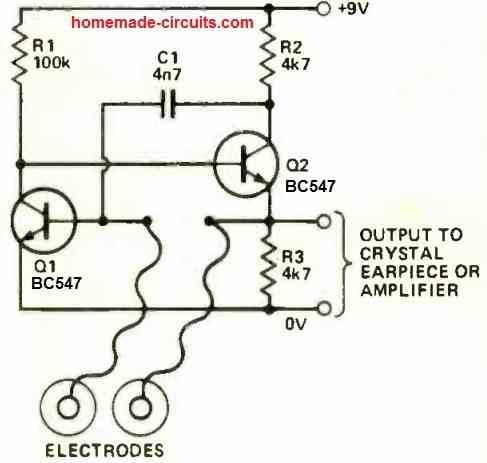
IR-senderen og fotodioden bruges som en fotosensor par, der kan bruges til at detektere den specificerede sti til bevægelse af linjefølgerrobotten, mens du går og klatrer op på vægge. Fotosensorparret giver passende signaler til at skifte transistorer til at drive motorerne på linjefølgerrobotten.
Trin 5: Linjefølger-robotkøretøj med gang- og klatringsmekanisme
Der er mange robotikprojekter til ingeniørstuderende hvor linjefølger robotkøretøj med gang- og klatringmekanisme er et innovativt og interessant projekt at designe på egen hånd ved hjælp af vores gratis e-bog til at designe elektronikprojekter.
Det anvendelse af robotteknologi øges hurtigt i vores daglige liv for flere funktioner såsom industrielle applikationer, der flytter eller løfter tunge produkter, transporterer inden for et begrænset område ved at følge specifik sti, behandling, svejsning, husholdningsapparater, autonome robotter, militære robotter til reduktion af menneskelige involvering og fare, samarbejdsrobotter til interaktion med mennesker, således at til udførelse af flere opgaver, uddannelsesrobotter, mobile robotter og humanoider.
Er du interesseret i at designe elektronikprojekter alene? Ved du hvordan man udvikler humanoide robotter? Hvis du vil vide mere om robotikprojekter til ingeniørstuderende, kan du sende dine forespørgsler, kommentarer, ideer og forslag i kommentarfeltet nedenfor for teknisk hjælp.