Indlægget forklarer et simpelt linjelaserstyret motordriverkredsløb, der fungerer ved at reagere på en præcision vandret laserlinie, genereret fra en linjelaserniveauindretning, og automatisk justerer justeringen af det tilsluttede værktøj eller jobarbejdet med ekstrem perfektion og nøjagtighed.
Hvad er Line Laser
Linjelaserudstyret er en elektronisk udskiftning med høj præcision af tømrerens gamle åndsniveauer.
Linjelaserenheden er faktisk et avanceret laseremitterende udstyr, der kan generere en 360 ° højpræcisionsbelyst vandret laserlinje, der giver en kalibrerende reference til alle industrielle eller konstruktionstekniske job, så slutresultatet af jobbet er perfekt lige og justeret uden en lille smule fejl.
Kredsløbet blev anmodet om af en af de dedikerede læsere af denne blog, Mr. Rafal.
De detaljerede diskussioner vedrørende arbejdsproceduren for den linjelaserstyrede motor kan læres af følgende afsnit:
Designmål
Hr. Rafal: Jeg er meget ny på dette. Jeg har undersøgt de sidste par uger og har ikke fundet præcis, hvad jeg har brug for.
Jeg vil være taknemmelig for enhver hjælp. Jeg vedhæfter et billede af min idé. Jeg vil styre to 12 V jævnstrømsmotorer med et laserniveau.
Linjelaserniveauet signalerer modtagerne.

Dette signal skal derefter styre retningen på 12 V DC motoren. Motoren roterer gevindstangen frem og tilbage for at justere værktøjets højde.
Fra hvad jeg opdagede, ville der være flere fotodioder forbundet parallelt, det ene sæt til at detektere laseren over nul-niveauet og det andet under dette niveau. Nulniveauet er bare en slags pause mellem fotodioderne for at forhindre systemet i at vågne op. Lasersensor uden skærm. Jeg gav kun et billedbillede.
Jeg har brug for et H-brokredsløb, men alt hvad jeg finder, skal bruges sammen med et Arduino-system. Om nødvendigt kan jeg købe en færdiglavet bro til en rimelig pris på op til $ 30
Ideelt set fungerer dette med både røde og grønne lasere, men bølgelængderne er så forskellige, at jeg tvivler på, at det kunne gøres, og at det ikke ville fungere på tværs af hele lysspektret.
Oprindeligt vil jeg gerne indstille niveauet for denne stråle, der er knyttet til motorerne med op-ned-knapperne. Jeg ville være glad for, hvis den anden motor derefter ville niveauere sig med gyroskopet, mens den sættes op, men uden Arduino kan det være meget svært.
Jeg føler, hvad jeg prøver at gøre er så simpelt, at jeg kan slippe væk uden at bruge Arduino. Og jeg insisterer på en analog på grund af de vanskelige forhold på en byggeplads, og det ser ud til, at jo mere elektronik, jo mere upålidelig er enheden.
Det fungerer kun indendørs, og laserafstanden er max 10m. Motoren, jeg fandt i begyndelsen, har et stort strømforbrug på 200mA max 2,19 A, men også et stort drejningsmoment.
Strøm 18 V jævnstrøm fra et Makita-batteri.
På forhånd tak for eventuelle forslag.
Hilsner fra Polen
Rafal
Swag : Jeg har en forvirring om, hvordan motorakslerne fungerer. Den gevindskruede skrue på begge motorer skubber værktøjet, men kan det ikke trække det tilbage? Hvordan fungerer det?
Er det muligt at implementere det samme med en enkelt motor?
Hr. Rafal: Nedre nivelleringslinjer ville måske være 70 cm, kun for små rum, f.eks. et toilet, så du kan komme ind gennem en dør.
Maskine uden drev, hånd trukket, kun udjævning af glattejern I videoen er de to gule genstande på master laserdetektorer, der er stift fastgjort til glatstrålerne.
Laseren står et eller andet sted længere væk, og den producerer en vandret linje.
Motorerne blev fastgjort til en vogn og gevindskruen til udjævning af retninger med laserdetektorer. Der skal være to motorer til at udjævne begge sider, men det er et spejlbillede.
Den eneste almindelige del ville være en to-kanals H-bro, som om jeg gjorde det fra et færdigt modul og muligvis et gyroskop, men det er en drøm :).
Det er vigtigt, at der er knap til venstre og højre motoromdrejning.
Proceduren er denne. Jeg hænger laseren for eksempel 2 m over det angivne gulvniveau. Jeg måler 2 meter fra laserstrålen til straightedges nederste kant.
Jeg regulerer højden ved at trykke på knapperne, der skifter til højre mod venstre, så den er lig med 2 meter til lige kantens nederste kant. Jeg satte detektorerne på masterne, så laserstrålen er på nul niveau mellem fotodiodesektionerne. Og resten vil gøre sig selv
I vedhæftet fil lagde jeg en tegning af detektoroperationen.
Rafal
Circuit Design

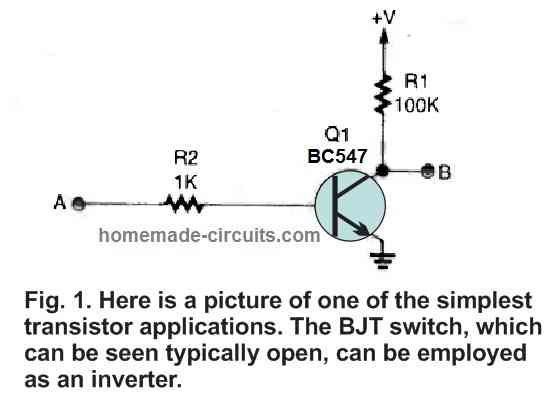
Når man ser på figuren ovenfor, kræves to sådanne identiske kredsløbstrin for at detektere og korrigere det tilknyttede motorkontrollerede værktøj med hensyn til laserlinjens nøjagtighed.
De to identiske trin er spejlbilleder af hinanden som vist nedenfor:

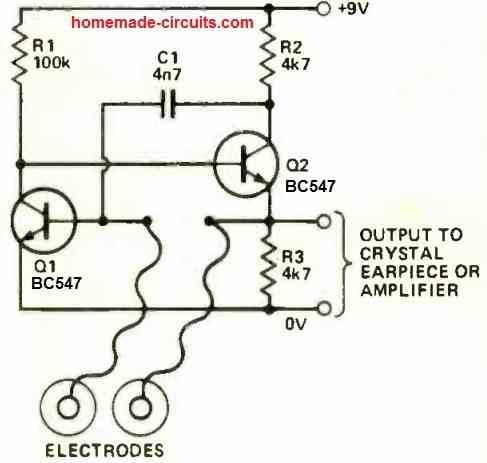
Kredsløbet er ret ligetil. Det fungerer med en vindueskomparator, der sikrer, at drivmotorer ikke er i drift, så længe parret LDR'er udsættes for den samme laserlinjelysstyrke.
Halv forsyningsspænding genereres derefter på den ikke-inverterende indgang på A1 og til den inverterende indgang på A2.
Så snart der opdages en afbøjning i laserlinjen (hvilket kan ske, hvis det motorkontrollerede værktøj ikke er justeret lige), ændres lysstyrken, der påvirker LDR'erne R1 og R2.
I denne situation driver indgangsspændingen til vindueskomparatoren væk fra halv forsyningsspænding. Denne situation får komparatorudgangen til at beordre motorbro-netværket til at bevæge motoren med eller mod urets retning.
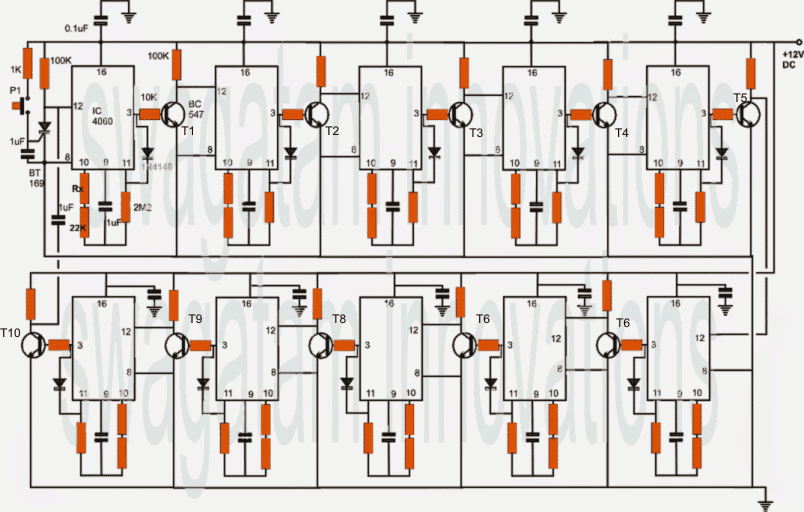
Transistorer T1. . . T4 er konfigureret som et bronetværk for at muliggøre omskiftning af motoren frem og tilbage afhængigt af LDR-belysning eller laserlinjeafvigelsesvinklen.
Dioder D1. . . D4 er positioneret til at annullere spændingstoppe, der genereres i den tid motoren er aktiv og kører. Funktionen af de forudindstillede potentiometre P1 og P2 er at lette justeringsjusteringerne.
Disse er finjusteret for at sikre, at motoren er helt slukket og inaktiv, så længe det relevante LDR-par er udsat for nøjagtig den samme lyslyslysstyrke.
Lad os f.eks. Sige, på grund af forkert justering af det motorkontrollerede værktøj, får laserlinjetiltningen lyset til at reducere på LDR R2 end LDR R1. Dette vil resultere i, at spændingen ved punkt A stiger over halvdelen af forsyningsspændingen.
I denne situation bliver A1 op-forstærkerudgangen høj, hvilket tvinger transistorer T1 og T4 til at fungere. Dette får igen motoren til at rotere i den relevante retning. Denne handling skifter automatisk det tilsluttede værktøj i en lige linje, indtil dets vandrette justeringsnøjagtighed falder sammen med laserlinjens nøjagtighed.
Omvendt, hvis vi antager, at værktøjet skal vippes med den modsatte retning, således at belysning af LDR'er er modsat det ovenfor diskuterede, får spændingen ved punkt A til at falde til under halv forsyningsspændingen. Denne betingelse udløser A2 op-forstærker til at gå højt, så T3 og T2 bliver operationelle.
Dette resulterer i, at motoren nu kører i den modsatte retning i et forsøg på at rette opretningen af værktøjet i den relevante retning, indtil det bliver perfekt lige sammenfaldende med laserlinjens vandrette nøjagtighed.
Op / Ned-knap
Op-ned-knapperne til oprindeligt forindstilling af vaterpasets højde kan simpelthen implementeres ved at tilslutte trykknapkontakter parallelt med hver af LDR'erne.
LDR-installation
For at få det korrekte svar fra LDR'erne skal de venstre højre par installeres inde i et rør som en kabinet, så de kun er i stand til at 'se' laserbelysningen og ikke noget andet omgivende lys.
Ideen kan ses i følgende billede:

Her kan vi se, at LDR'erne er placeret meget tæt på hinanden, hvilket sikrer, at når laserlinjen er i det nøjagtige centrum, bliver en del af begge LDR-parene ensartet belyst af laserlyset.
Den forreste del af LDR-kabinettet kunne være dækket af en diffust linse, så laserbelysningen kunne blive diffunderet indvendigt over de respektive LDR'er ensartet.
Tidligere: Enkel tyverialarmkredsløb til beskyttelse af værdifulde genstande Næste: Universal BJT, JFET, MOSFET Tester Circuit